CHI '25 (Late-Breaking Work)
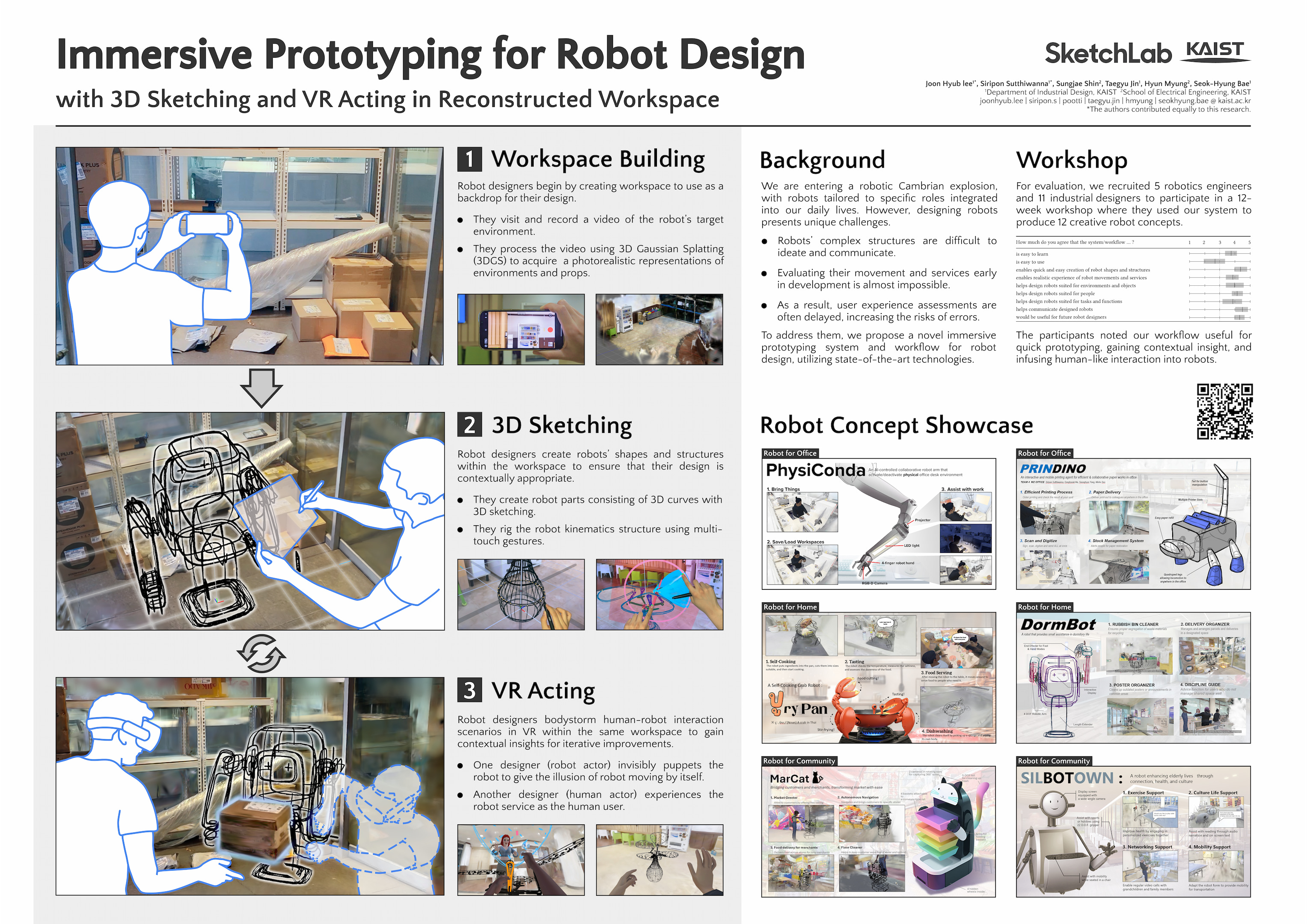
Immersive prototyping for robot design with 3D sketching and VR acting in reconstructed workspace
Joon Hyub Lee
Siripon Sutthiwanna
Sungjae Shin
Taegyu Jin
Hyun Myung
Seok-Hyung Bae
[PDF]
Rapid advances in robotics and AI technologies are opening the possibility of a wide range of commercial robot products with diverse shapes, sizes, and structures specialized for various environments, contexts, and roles. This trend calls for innovative tools and methods for designing robots as products. In this study, we propose a novel immersive prototyping system and workflow for quickly and easily creating desired robot shapes and structures through 3D sketching in target environments, realistically experiencing their movements and services through VR acting in the same environments, and iteratively improving their designs based on contextual insights. We conducted an extended robot design workshop with participants from backgrounds in robotics engineering and industrial design. The results show that the proposed system and workflow can help robot designers produce highly creative and compelling design outcomes, while also identifying areas for future improvement.3 min. presentationPoster
People